MOVING
The robot can move forward and backward (reverse). It has one motor for each wheel. The motors are connected to the B and C ports of the robot by cables. (If this is not the case on your robot you will need to adjust the instructions in this book accordingly.)
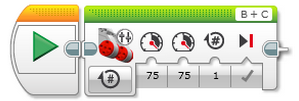
Drag a Move Tank block (4th along, green tab) and connect it to the green arrow.
Drag a Move Tank block (4th along, green tab) and connect it to the green arrow.
The Move Tank block lets you control how far your robot will move but it doesn’t use metres or centimetres, and you might start to see why soon.
You can change the settings on your block.
If you don't change anything, the robot is set to move the B motor and the C motor at power 75 for 1 rotation and then brake.
You can change the settings on your block.
If you don't change anything, the robot is set to move the B motor and the C motor at power 75 for 1 rotation and then brake.
ROTATIONS:
A rotation is a turn. One rotation is one whole turn of the wheel.
Let's find out how far the robot will move with one rotation.
You will need to download the program you have written on the computer (the Move Tank block) to the robot. Download means to copy the program from your computer to the robot.
Download your program to the robot using the Download arrow at the bottom right of your screen.
A rotation is a turn. One rotation is one whole turn of the wheel.
Let's find out how far the robot will move with one rotation.
You will need to download the program you have written on the computer (the Move Tank block) to the robot. Download means to copy the program from your computer to the robot.
Download your program to the robot using the Download arrow at the bottom right of your screen.

- The USB cable needs to be connected to the robot's USB port while the computer is downloading.
- The robot needs to be turned on. Press the Dark Grey button on the robot if your robot isn't turned on.
It is best not to use the Run arrow unless the robot is on the floor already.

|

|
Run your program on the robot.
Run the program again from the arrow tab.
Mark with a pencil a place on the side of a wheel hub. Watch how far the mark moves when your program is run.
- Push the right button to select the second tab and see your Project's name.
- With your Project's name highlighted, use the dark grey button to open your project folder. You will then see your program's name.
- Use the lower button to highlight your program's name.
- Then press the dark grey button to run the program.
Run the program again from the arrow tab.
Mark with a pencil a place on the side of a wheel hub. Watch how far the mark moves when your program is run.

MEASURING THE MOVE
Measure how far your robot moves with 1 rotation.
Calculate how far your robot will move with 2 rotations.
Try it, and measure it. Note – don't use a second block. Change the 1 to 2 on your existing block.
Question: Does doubling the rotations double the distance travelled?
Calculate how far your robot will move with 2 rotations.
Try it, and measure it. Note – don't use a second block. Change the 1 to 2 on your existing block.
Question: Does doubling the rotations double the distance travelled?
DEGREES
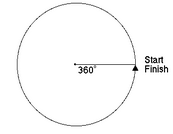
You can measure how far the wheel will go round using a measure called degrees.All the way round a circle (or a wheel) is 360 degrees, which is written 360o.
If you choose either 1 rotation or 360 degrees, your robot should do exactly the same thing - turn the wheel 1 complete circle.
Change your Move Tank block's setting from On for Rotations to On for Degrees. The 1 will automatically update to 360 Degrees.
If you download and run your program now, the wheel should still go round exactly once.
Can you work out how many degrees would make the wheel turn half way round?
Can you work out how many degrees would make the wheel turn a quarter of the way round?
Degrees are really useful if you want the wheel to turn just a little.
If you choose either 1 rotation or 360 degrees, your robot should do exactly the same thing - turn the wheel 1 complete circle.
Change your Move Tank block's setting from On for Rotations to On for Degrees. The 1 will automatically update to 360 Degrees.
If you download and run your program now, the wheel should still go round exactly once.
Can you work out how many degrees would make the wheel turn half way round?
Can you work out how many degrees would make the wheel turn a quarter of the way round?
Degrees are really useful if you want the wheel to turn just a little.
TASK 2: DISTANCE CHALLENGE
- Make your robot travel exactly 8 cm. See if you can get it right first time, using the measurements you have already made to calculate the settings required.
- Make your robot travel exactly 1 metre. Once again, work it out first.
